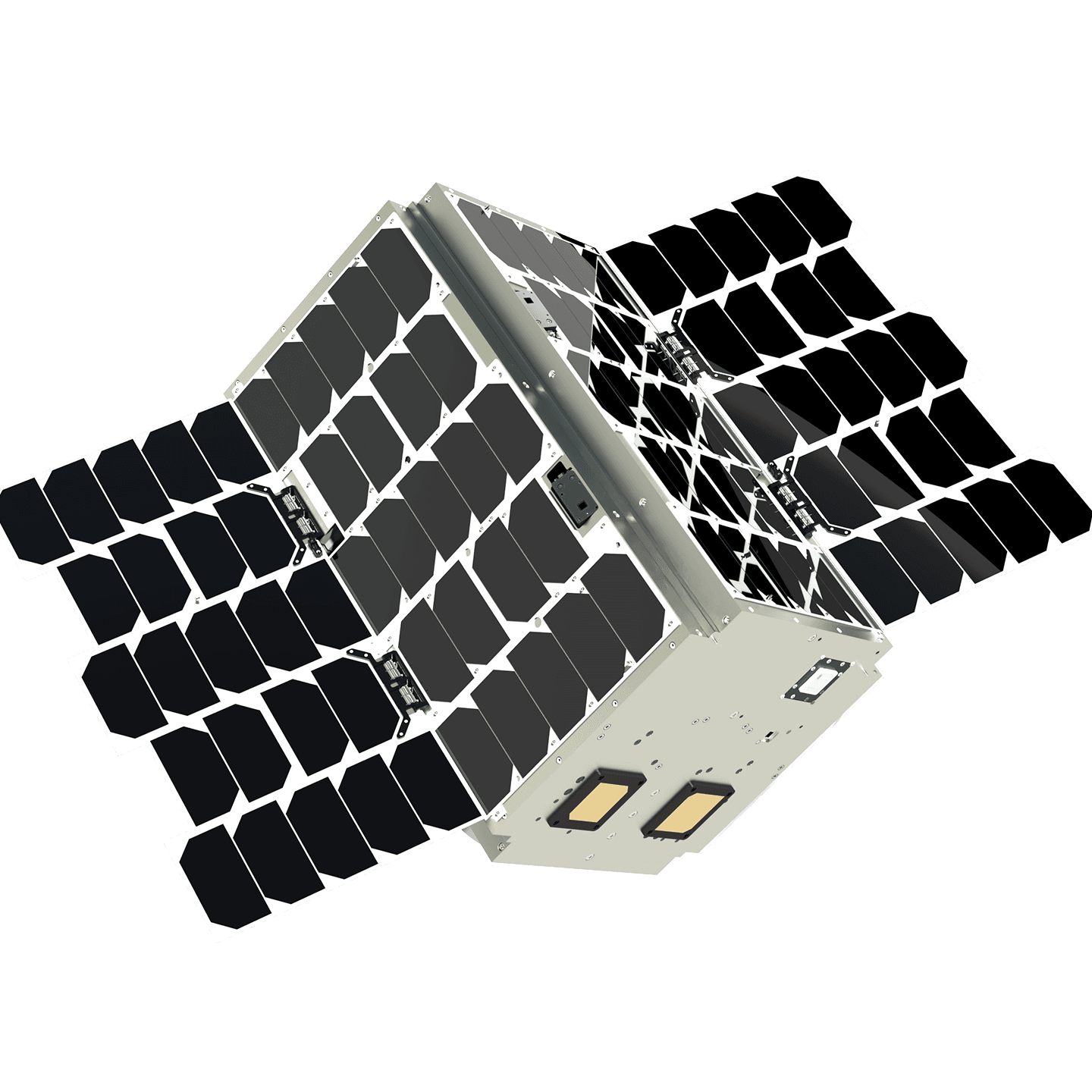
16U Satellite
Reliable and high performing 16U CubeSat with several options available to enhance platform capabilities. Our 16U satellite, featuring GEO options, allowing buyers to customize it precisely to their needs.
Mission example
- Capable of maneuvering from different orbital slots in Geostationary orbit
- Precision Agriculture Monitoring for Optimal Crop Management
- Stellar Spectroscopy for Detailed Star Analysis 16U CubeSat configuration for Compact Form Factor
- Environmental Hazard Detection, Including Oil Spills and Chemical Leaks
MSRP
*€800.000
Specifications
Description
Space Inventor’s 16U satellite stands as the highest-performing CubeSat in our portfolio, with proven flight heritage from missions in both Geostationary and Low Earth Orbits. Designed for advanced missions including Space Situational Awareness, bring-into-use, and rendezvous, it delivers exceptional reliability and performance.
Equipped with cutting-edge Attitude and Orbit Control System (AOCS) technology, this satellite provides high-precision pointing, remarkable agility, and a powerful momentum capacity of 100 mNms, supported by a torque capability of 20 mNm. The 16U platform offers configuration flexibility, accommodating payloads of up to 12U depending on orbit requirements. Its robust design supports payloads with strict demands for low micro-vibrations, precise pointing accuracy, and resilience against the harsh conditions of geostationary orbit.
Ideal for national security, observation, communications, and rendezvous missions, this satellite delivers a cost-effective solution without sacrificing reliability or performance.
*Platform without NRE, Propulsion and Payload
Features
Mechanical drawing

Available modules in satellite

Reaction Wheel

PATCH1-L-R
L-Band Patch 1 antenna. This antenna design offers simplicity and efficiency, making it suitable for various applications like GPS systems, satellite communication, and remote sensing due to its ability to maintain a stable connection within this frequency range.
PATCH2X2-S-R
S-Band Patch 2 antenna. An S-band 2x2 antenna array is a compact yet powerful configuration of four antenna elements designed to operate in the S-band frequency range.
PATCH1-S-R
S-Band Patch 1 antenna. An S-band is widely used in various applications, including satellite communication and radar systems, for its simplicity and effectiveness in this frequency range.
An S-band single patch antenna is a compact single port antenna designed for the 2025-2110 MHz or 2200-2290 MHz S-band frequency range.
PATCH4X4-X-R
X-Band Patch 4 antenna. This configuration provides exceptional performance, making it crucial for advanced radar systems, satellite communication, and high-frequency applications requiring precise directional control and enhanced signal strength.

Battery
Didn’t find what you were looking for?
We’re always ready for a talk about your desires. Please write in detail what you are looking for and we’ll schedule a meeting with you where we can discuss all the details.